DeepSeek Sparse Attention (DSA)
likchern: 谁家好人休息是去研究 sparse attn 怎么实现的,特别还是在赶论文的时候 ( ̄ε(# ̄)
简介
为了适应长上下文场景,DSA 通过只保留 top-k tokens 参与计算,将 attn 计算从 \(\mathcal{O}\left(L^2\right)\) 降低到 \(\mathcal{O}\left(L\cdot k\right)\)
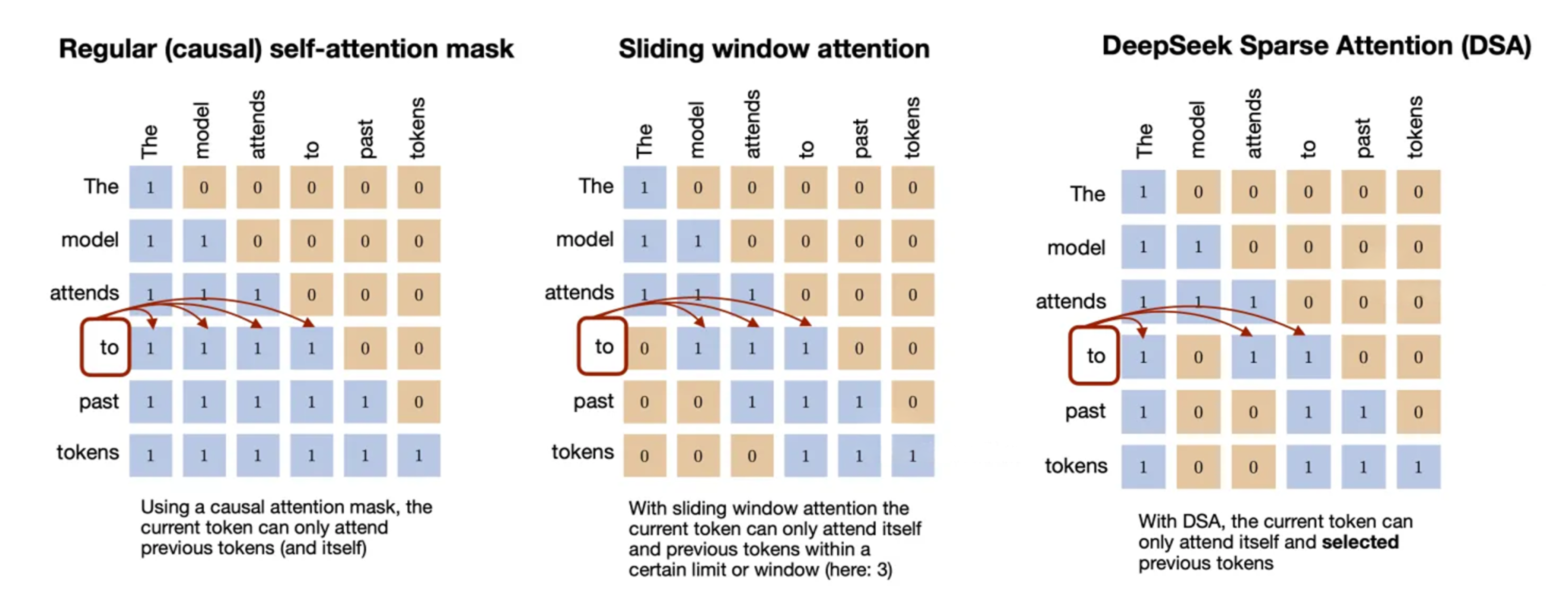
DSA 的思想借鉴自 sliding window attention(当前 query token 只关注一个固定窗口的子集,位置相近度优先),通过 indexer 和 token selector 选择从过去的所有 token 中选择哪些可以被关注(语义相关性优先),使得选择更加随机
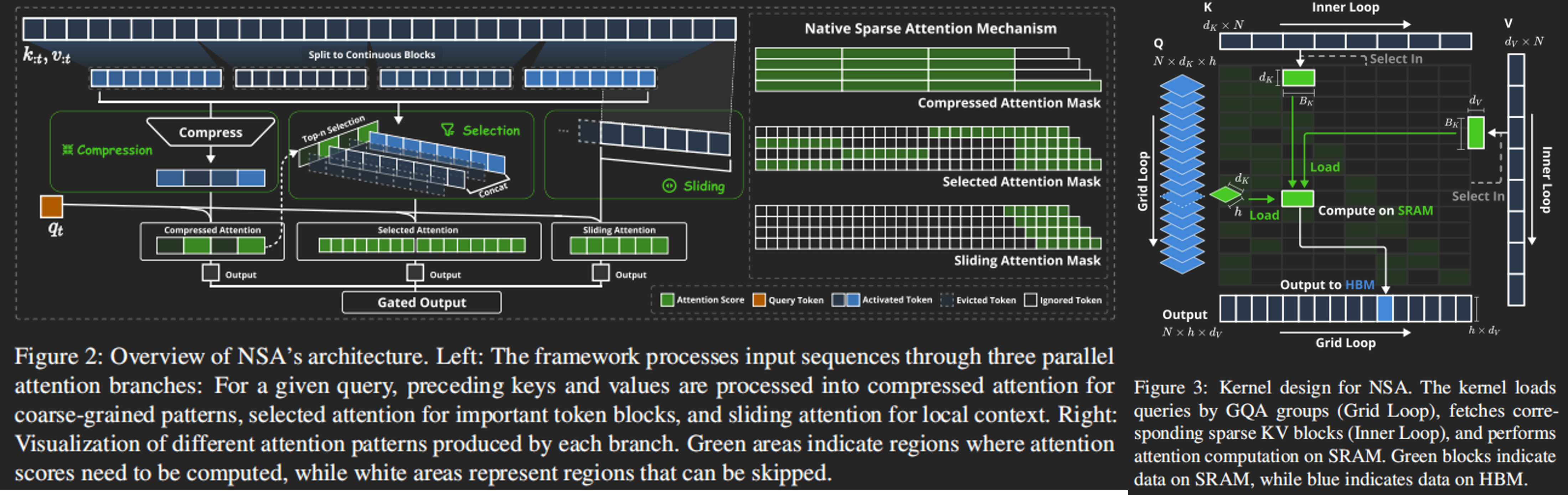
稍微了解后发现是在先前 ACL'25_Native-Sparse-Attn 的基础上将 Sliding 替换为 Indexing,加上原本的 Compression 和 Selection 整合进 Indexer 中
其中,Selection 的 kernel 实现从 Triton 改成 TileLang,策略不变:在沿用的 Sparse Attn 中,GQA 或 MQA 的每个 query head 共享 KV$, 将整个 group 直接加载到 smem 上,避免 naive attn 中跨 KV block query 的情况
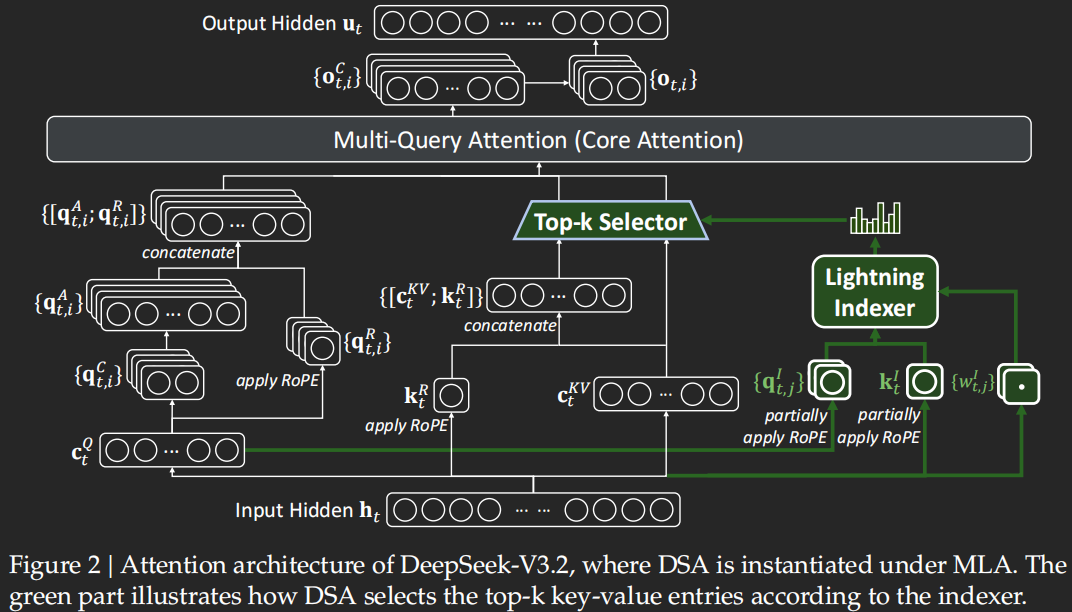
DSA 在原本 MLA 的基础上增加了 Lightning Indexer 和 Top-k Selector(图中 绿色 通路),基于所有先前的 token 为每个新的 query token 计算 index score
实现
原理
Lightning Indexer 的计算沿用 key-query 思想,原本的 attention score 即 index score,输入包括:
- 从 query token \(\mathbf{h}_{t}\) 映射得到的 query emb \(\mathbf{q}_{t,j}^I \in \mathbb{R}^{d^I}\) 与 weight \(w_{t,j}^I \in \mathbb{R}\)
- 从序列中先前的token \(\mathbf{h}_{s}\) 映射得到的 key emb \(\mathbf{k}_s^I \in \mathbb{R}^{d^I}\)
在 Indexer 中,通过 \(H^I\)-heads key-query 计算出 index score
注意到这里使用的是 ReLU 而非 Softmax,保证不会放大负噪声的同时使计算量对 FP8 更友好
计算完 index score 后,Top-k Selector 选出 \(\left\{I_{t,s}\right\}\) 中 top-k 对应的 KV-entry 参与最后的 Attention 计算
代码
核心代码 在 inference/model.py 中,主要观察 Indexer.forward():
-
将 query token
qr通过一层 Linear 映射到 query emb,然后做 partial RoPEq = self.wq_b(qr) q = q.view(bsz, seqlen, self.n_heads, self.head_dim) q_pe, q_nope = torch.split( q, [self.rope_head_dim, self.head_dim - self.rope_head_dim], dim=-1 ) # rope in indexer is not interleaved q_pe = apply_rotary_emb(q_pe, freqs_cis, False) q = torch.cat([q_pe, q_nope], dim=-1)DSA 的核心是语义相关性优先,即选出语义强相关的 token,如果使用全维 RoPE 会强行把所有位置信息编码进 query emb 中,使其变得位置敏感
对此,DSA 将 query emb 拆分成 RoPE(局部顺序)和 Non-RoPE(全局语义)两个子空间,让 Indexer 自然偏向后者(后面要做 Hadamard Transform)
-
从输入
x经过 Linear + LayerNorm 得到 key emb,同样也是做 partial RoPE -
对 query emb 和 key emb 进行 Hadamard Transform,使 q/k emb 的能量分布变得均匀
Hadamard Transformdef rotate_activation(x: torch.Tensor) -> torch.Tensor: assert x.dtype == torch.bfloat16 from fast_hadamard_transform import hadamard_transform hidden_size = x.size(-1) return hadamard_transform(x, scale=hidden_size**-0.5) q = rotate_activation(q) k = rotate_activation(k)partial RoPE 导致 q/k emb 的能量分布不均匀,直接稀疏选择会被能量大的部分主导
Hadamard Transform 作为一种完全确定且可逆的 正交变换(\(\mathcal{O}(n\log n)\),bit-flip + add),把每个输出维度变成所有输入维度的均匀线性组合,从而使得能量分布变均匀,常用于 sparse routing 中
-
到上一步都是 BF16,这一步 quant 到 FP8 减少计算
q_fp8, q_scale = act_quant(q, block_size, self.scale_fmt) k_fp8, k_scale = act_quant(k, block_size, self.scale_fmt)act_quant caller 将 emb 规整成 "block 对齐、scale明确" 的 FP8 tensor
def act_quant( x: torch.Tensor, block_size: int = 128, scale_fmt: Optional[str] = None ) -> Tuple[torch.Tensor, torch.Tensor]: """ Quantizes the input tensor `x` using block-wise quantization. Args: x (torch.Tensor): The input tensor to be quantized. Must be contiguous and its last dimension size must be divisible by `block_size`. block_size (int, optional): The size of the blocks to be used for quantization. Default is 128. scale_fmt (Optional[str], optional): The format of the scale. Default is None. Returns: Tuple[torch.Tensor, torch.Tensor]: A tuple containing: - The quantized tensor with dtype `torch.float8_e4m3fn`. - A tensor of scaling factors with dtype `torch.float32`. """ assert x.is_contiguous(), "Input tensor must be contiguous" assert ( x.size(-1) % block_size == 0 ), f"Last dimension size must be divisible by block_size (block_size={block_size})" N = x.size(-1) y = torch.empty_like(x, dtype=torch.float8_e4m3fn) s = x.new_empty(*x.size()[:-1], N // block_size, dtype=torch.float32) kernel = act_quant_kernel(N, round_scale=scale_fmt is not None) kernel(x.view(-1, N), y.view(-1, N), s.view(-1, N // block_size)) return y, s而
act_quant_kernel则是基于 TileLang 实现 FP8 act block-wise quant 算子对形状
(M, N)的输入,沿 N维 按group_size=128为 block、沿 M维 按blk_m=32为 tile,于是对于每个(32, 128)的 tile:- L33:计算每一行的 absmax
- L35-39:按照 FP8 e4m3 进行 scaling
- L41-43:将 quant 到的数值 clamp 到 FP8 范围中
-
存入Indexer 内部维护的 K cache 中
-
从输入
x经过 Linear 后归一化得到 weight,配合 query emb 所以还要 scale(注意这里是 FP32) -
核心 kernel
fp8_index,可以看到这里是基于所有先前的 token 进行计算(注意是:end_pos)index_score = fp8_index( q_fp8.contiguous(), weights, self.k_cache[:bsz, :end_pos].contiguous(), self.k_scale_cache[:bsz, :end_pos].contiguous(), ) if mask is not None: index_score += mask略过封装,直接看
fp8_index_kernel:- L18 为 Kernel 启动 :
grid.b为 batch,grid.m为 query token,grid.n为 key token 的 chunk(512),即一个 query token 对应一个 kernel inst - L19-20 将 query 加载到 shared memory 上,方便后续 key block 复用
- L25 对 key 进行 2-stage (load/compute overlap) 分块流水,每次处理 128 key tokens
- L32-40 计算 \(\text{logits}[n,h]=\sum_{d} k[n,d] \cdot q[h,d]\),每个 key token 得到一个 \(h\) 维 tensor
- L43 有别于传统 Attention:
- 用 ReLU 而不是 Softmax,不会放大负噪声、对 FP8 计算友好
- 每个 head 有各自的 scale,避免 sparse 决策被某个 head 垄断;在 GEMM 后再 scale 避免精度损失
- L46 综合多个 head 计算 index score,在 L49 得到最后 dequant 的数值
- L18 为 Kernel 启动 :
-
计算 topk_indices:所有 rank 参与计算、rank0 仲裁 index
topk_indices = index_score.topk(min(self.index_topk, end_pos), dim=-1)[1] topk_indices_ = topk_indices.clone() dist.broadcast(topk_indices_, src=0) assert torch.all( topk_indices == topk_indices_ ), f"{topk_indices=} {topk_indices_=}" return topk_indices单独在 rank0 上算了再 broadcast 会引入一次额外 AllReduce/Gather,而只同步 index 是最省带宽的
训练
使用 Linear 进行 mapping,需要进行训练,分别由 Dense Warm-up 和 Sparse Training 两个 stage 组成
Warm-up 用于初始化 Lightning Indexer,除 Lightning Indexer 外(实际就是除绿色通路外)的权重全部冻结:
-
为了使 index score 与最终 attn 分布对齐,将所有 attn head 的 score 加起来,经过 L1-正则化得到输出分布 \(p_{t,:}\in \mathbb{R}^t\);定义 KL-散度损失作为 indexer 的训练目标函数 \(\mathcal{L}^I=\sum_{t} \mathbb{D}_\text{KL} \left(p_{t,:}\parallel \text{Softmax}(I_{t,:})\right)\) ,并取所有 token 来训练 indexer
-
lr=1e-3,1000 steps,(16 seq * 128K tok) per step
Training 则是训练整个模型,其中模型和 indexer 的训练分开来:
- 对于 indexer,在原本的 \(\mathcal{L}^I\)上,仅关注被选中的 token set \(\mathcal{S}_t\),不再是所有的 token;主模型依然按原始 loss 来训练
- lr=7.3e-6,2048 KV tok per Q tok,15000 steps,(480 seq * 128K tok) per step
推理
在 SGLang 中,DSA 的核心在 layers/attention/nsa 下 ,对于 DeepSeek 的封装则沿用 models/deepseek_v2.py
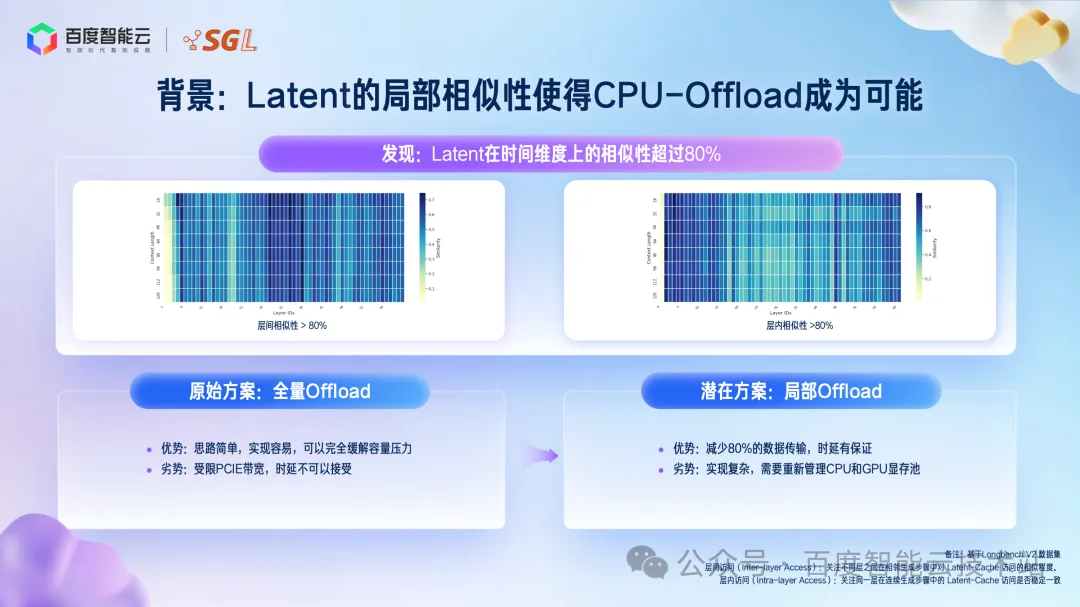
DSA 的引入将全量 Attn 替换为 Indexer + 2K (sparse) Attn,仍需完整存储整个序列的全量 Latent,同时 index cache 进一步引入 > 20% 的显存开销;为了提升 batch size,需要减少 GPU 上 latent cache, 全部卸载到 CPU 的话 Decode 计算时访问 Latent cache 会受限于带宽,因此直接的想法是能否采用局部 offload
局部 Offload
局部 offload 的前提是 latent cache 的访问要有足够 locality 才有效,否则触发一次 cache miss 就得不偿失;从 DSA 的设计看,与滑动窗口强制替换不同,过往被选中的token由于语义相似性,大概率在下一步也会被选中,有很强的时序局部性
在 LongBench V2 上的实验发现 latent cache 的 intra-layer 相似性 \(r_t^l=\cfrac{|K_{t-1}^l\cap K_t^l|}{|K_t^l|}\) > 80%,其中 \(K_t^l\) 表示第 \(l\) 层在第 \(t\) 步的 top-k index set,验证了 DSA 的强时序局部性
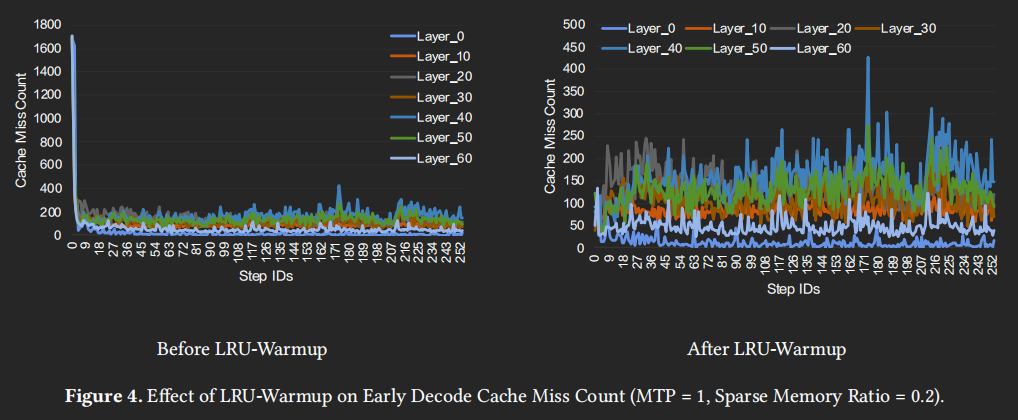
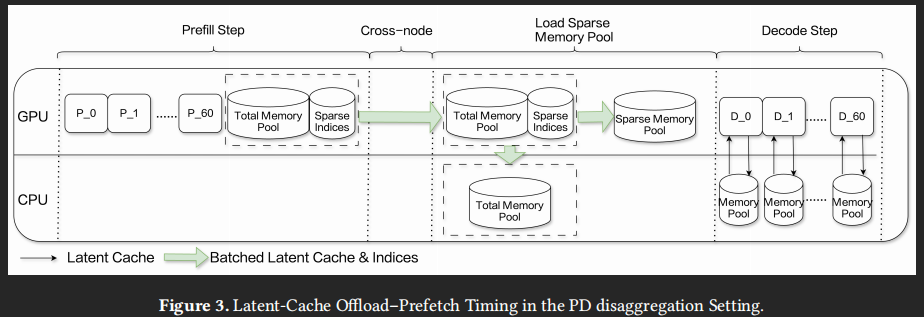
这能进一步确定使用 LRU 来替代原本的 FIFO 是最优的;在 Decode 刚启动时 cache 没有被填满所以会出现高 cache miss,直观做法就就是利用 prefill 的结果预填充 cache:在 ESS 中,将 prefill 阶段最后 32 windows 对应的 selected latent cache IDs 放入 GPU 上的 smem,取出对应的 cache entry 放入 GPU 上的 sparse memory pool 中
UVA 访存
在 SGLang 中 MLA 采用 PagedAttention 的 non-contiguous 存储、latent cache 单块仅 656 bytes(小块数据特征显著),导致频繁的小数据搬运,无法发挥 PCIe 的带宽(实测为 0.79 GB/s for H2D, 0.23 GB/s for D2H)
对此,可以基于 CUDA 的 UVA,设计 address-based on-demand transfer,来减少频繁 cudaMemcpyAsync 调用的开销(优化后达 37 GB/s for H2D, 43 GB/s for D2H)
- UVA + pinned host memory 后:CPU 内存和 GPU 显存共享 VA,GPU可以直接 L/S 访问 CPU内存,从 GPU page fault/cache miss 变成 GPU 主动发起 PCIe 读写
- GPU 可以自动 coalescing,IOMMU/ATS 将多个 page request 合成更大的 PCIe 传输,同时挂起大量未完成的 流式 PCIe request
DA + DBA Overlap
传输开销是不可避免的:Attn 启动前会触发 H2D 获取 missed latent cache,而 D2H 则将当前步新生成的 latent cache entry 写回 CPU;只能想办法 overlap,但在 SGLang 的原始实现中并没有做的很好:
-
self.indexer的输入依赖只有hidden_states+q_lora+positions- hidden_states 不变
- L12-35:对 latent Q 作 layernorm 后赋值给
q_lora - L62-63:为了适应 context parallelism,
positions的编码方式可能会被重构
-
其余无关 self.indexer 的计算包括:
- L22, 28-30:latent K 作 layernorm
- L38:将 Q 投影到 attention head
- L42-60:为后面的 MLA 提前计算好 Q No-RoPE 的部分,也就是 PreAttn
- L65-73:PreAttn 的后处理
对此,ESS 将与 Indexer 无关的 PreAttn 计算后移,来掩盖一部分数据搬运,然后依次对 Attn 和 Indexer 切分来填补气泡
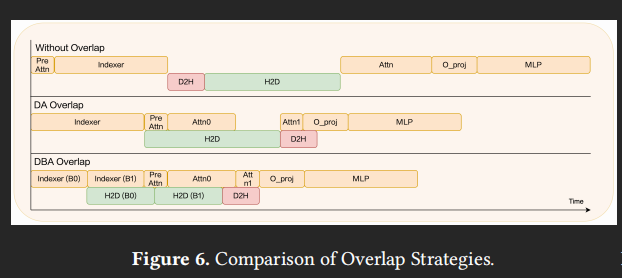
对于 Attn 可以进一步分成 "直接复用本地 latent cache 热数据" 和 "等待 H2D 换入冷数据" 这两个 kernel,前者执行计算时同步发起后者的数据请求,因此被称为 Dual Attn (DA) Overlap
更进一步,沿着 batch dim 切分 Indexer,先计算前半的 Indexer 后立即触发 H2D,让紧接着的后半 Indexer 和 PreAttn 来掩盖掉,此时前半能直接参与 Attn0 计算,实现气泡完全消除,也就是 DualBatch-Attn (DBA) Overlap
尽管如此,不同层内的 cache miss 行为存在显著差异,尤其是低 Sparse Memory Ratio(Sparse Memory Pool 相对 Total 的比例)的时候,意味着不能选用单一的 Overlap
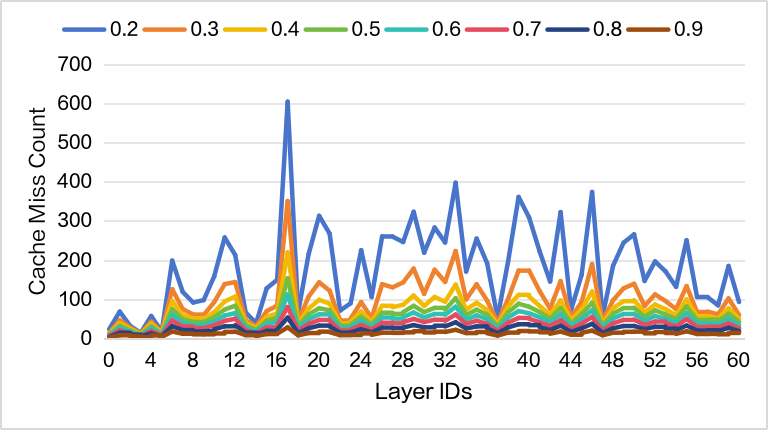
对此要先确定 在不同 context length 下各层的 cache miss 行为是否一致,从而确定每个层适合的 Overlap 策略:
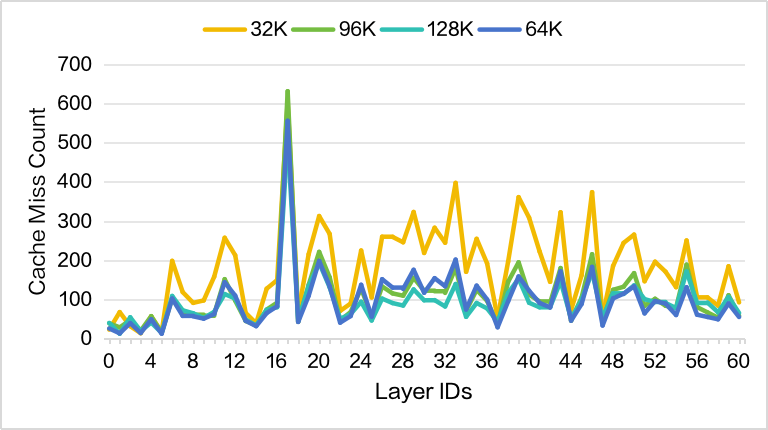
-
Sparse Memory Ratio=0.2(较小)时 cache miss 对比,当 context length = 32K 时,较小的 sparse memory 会触发频繁换入换出;对于较大的 context length,DSA 的设计使得 attn 始终集中在少数高频 token 上,每次 query 是机会命中的 KV block 数几乎恒定,更能实现反复 cache hit
-
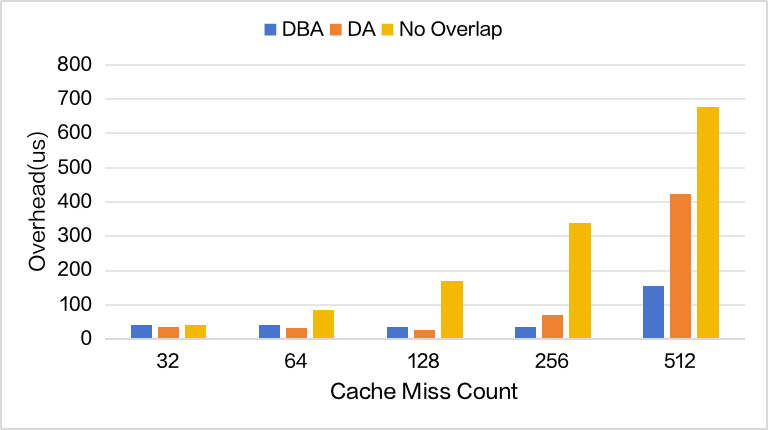
进一步对不同 cache miss count 分析三种策略的开销,由于 Indexer 的计算量随 context length 线性增加,DBA Overlap 能很好掩盖掉 latent cache 延迟;反之,DA Overlap 不引入 Indexer 划分,在短 context length 表现更好